商铺名称:广州三合自动化设备有限公司
联系人:马杰(先生)
联系手机:
固定电话:
企业邮箱:2849382866@qq.com
联系地址:广州市南沙区榄核镇数码花园1座201室
邮编:511480
联系我时,请说是在线缆网上看到的,谢谢!
|
|
SIMATIC S7-1200,模拟输入, SM 1231 TC,热电偶 4 模拟输入 | |
| 一般信息 | ||
| 产品类型标志 | SM 1231,AI 4x16 bit TC | |
| 电源电压专卖全新西门子S7-1200SM1231热电偶模块正品 | ||
| 额定值 (DC) | ||
| ● DC 24 V | 是 | |
| 输入电流 | ||
| 耗用电流,典型值 | 40 mA专卖全新西门子S7-1200SM1231热电偶模块正品 | |
| 来自背板总线 DC 5 V,典型值 | 80 mA | |
| 功率损失 | ||
| 功率损失,典型值 | 1.5 W | |
| 模拟输入 | ||
| 模拟输入端数量 | 4; 热电偶 | |
| 电压输入允许的输入电压(毁坏限制),最大值 | ±35 V | |
| 温度测量的技术单位,可调节 | 摄氏度/华氏度 | |
| 输入范围专卖全新西门子S7-1200SM1231热电偶模块正品 | ||
| ● 电压 | 是 | |
| ● 电流 | 否 | |
| ● 热电偶 | 是; J, K, T, E, R, S, N, C, TXK/XK(L);电压范围:±80 mV | |
| ● 电阻温度计 | 否 | |
| ● 电阻 | 否 | |
| 输入范围(额定值),电压 | ||
| ● -80 mV 至 +80 mV | 是 | |
| ● 输入电阻(-80 mV 至 +80 mV) | ≥1 兆欧 | |





? 利用可存储在驱动装置中的程序步进行定位,包括程序步变更
启用条件以及针对之前参考过的轴执行的特定任务
? 使用 STARTER 作为程序步编辑器
? 程序步包含以下信息:专卖全新西门子S7-1200SM1231热电偶模块正品
- 作业编号及作业内容(如定位、等待、跳转到指定程序步、设
置二进制输出、移动到固定停止点)
- 运动控制参数 (目标位置、速度、加速及超调)
- 模式 (例如隐藏程序步和继续执行任务的条件,包括专卖全新西门子S7-1200SM1231热电偶模块正品
“ 停止后继续执行 ”(Continue_with_stop)、 “ 连续执行
”(Continue_flying) 和 “ 基于外部高速探头输入继续执行
”(Continue_externally using high-speed probe inputs))
- 作业参数 (如等待时间、程序步状态)专卖全新西门子S7-1200SM1231热电偶模块正品
直接设定点输入 (MDI) 模式
? 使用直接设定点输入(如通过 PLC 中的过程数据)进行(绝对
或相对)定位或设置 (连续闭环位置控制)
? 在移动过程中始终可以干预运动控制参数(接受动态设定点),
也可以在设置模式与定位模式之间动态切换。
? 如果轴未回零,也可在相对定位或设置模式中使用直接设定点
输入运行模式 (MDI)。这意味着可使用“动态寻参”实现动态同步
以及重新回零。专卖全新西门子S7-1200SM1231热电偶模块正品
点动模式
? 通过“连续位置控制”或“点动增量”模式实现轴的闭环位置控制,
这两种模式可切换 (按“步长”移动
在图10中定义了partnet A用于UDP通信的数据连接结构的名称UDT65和地址数据块的名称UDT66,在项目open_UDP_wizard中选择块文件夹。点击下一步如图11所示,再下一步开始编译,如图12所示:
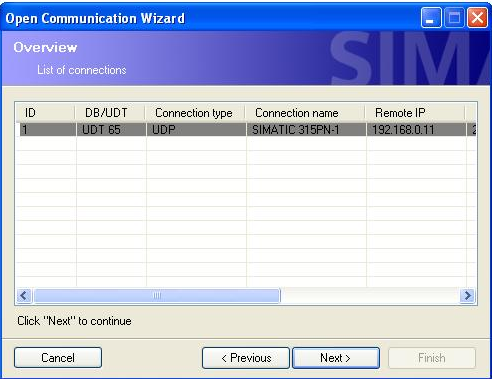
图11
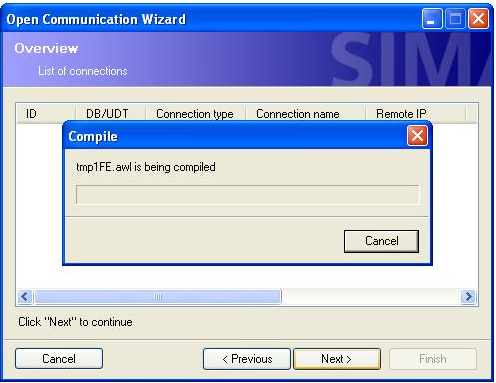
图12
编译无误后如图13所示:
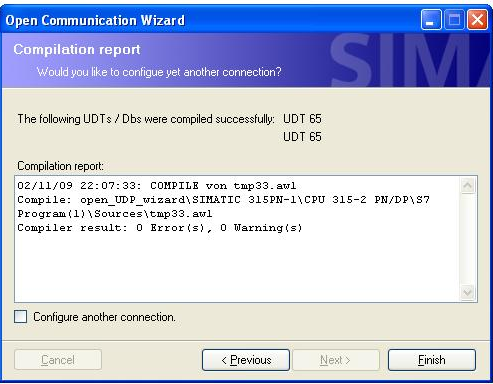
图13
点击Finish完成向导的配置。这样在项目open_UDP_wizard的块中生成了UDT65, UDT66,如图14所示。
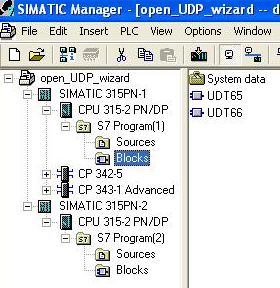
图14
用同样的步骤为SIMATIC 315PN-2 站配置向导,完成配置后在SIMATIC 315PN-2站的块中生成了UDT65,UDT66。
4. 在STEP7中为项目open_UDP_wizard编写程序
首先为partner A编写程序。在SIMATIC 315PN-1的块中创建DB101,定义一个变量DB_VAR,变量类型为UDT65。如图15所示。
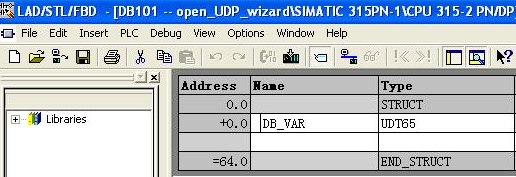
图15
接着创建DB102,定义一个变量DB_VAR,变量类型为UDT66。如图16所示。